Publications
From NewlyPossible.org
Selected works by Bryant Walker Smith
Recent Highlights
- For Humanity (2025). This brief speech for the launch of the Joint Academy on Future Humanity argues that technology makes humanity more rather than less important.
Articles
- "Self-Driving" Means Self-Driving (2025). Tesla uses the name "Full Self-Driving" to market a driver assistance system that still requires its user to pay attention to the road. And yet, as this article documents, there is a broad consensus among developers and regulators of motor vehicle technologies, including Tesla itself, that the term "self-driving" correctly refers only to a system whose user does not need to pay attention. This conclusion is foundational to ongoing legal proceedings around the world.
- Regulating Robotaxis (2025) (with Matthew Wansley). This article offers a plan to regulate robotaxis focused on pragmatic internalization of external costs, competition in transportation markets, and livability of communities.
- Ideal Enforcement: How Do We Achieve Optimal Enforcement of Traffic Law as Ubiquitous Enforcement Becomes Technologically Conceivable? (2024) (with Jeffrey Michael and Johnathon Ehsani). This interdisciplinary article uses traffic law as a case study for how automation and private monitoring could drive a dramatic increase in overall enforcement -- and presents principles for an alternative vision of ideal enforcement.
- An Academic Vision for AI (2023), based on An Academic Vision for AI Ethics (2022). This brief statement describes how universities might approach artificial intelligence.
- DALL-E Does Palsgraf, 14 Journal of Law, Technology, and the Internet 82 (2023). This article asks a leading artificial intelligence (AI) tool for image generation to illustrate the facts of a leading law school case. It introduces machine learning generally, summarizes the seminal case of Palsgraf v. Long Island Railroad, presents the images that the tool created based on the facts as the majority and dissent recount them, and then translates this exercise into lessons for how lawyers and the law should think about AI.
- Initial Thoughts on "road safety challenges posed by the use of automated vehicles in traffic that an international legal instrument could adequately address" (May 2022). This paper, prepared for an ongoing drafting effort within the UN's Global Forum for Road Traffic Safety, highlights issues raised by the potential international character of automated driving.
- From Driverless Dilemmas to More Practical Commonsense Tests for Automated Vehicles, Proceedings of the National Academy of Sciences (PNAS) (March 16, 2021) (with Julian De Freitas, Andrea Censi, Luigi Di Lillo, Sam E. Anthony, and Emilio Frazzoli). This article sketches a pragmatic framework for testing common sense as an integral part of assessing the safety of an automated driving system. Behavior that is safe, predictable, reasonable, uniform, comfortable, and explainable (SPRUCE) can suggest common sense.
- How Reporters Can Evaluate Automated Driving Announcements, 2020 Journal of Law and Mobility 1 (2020). This article identifies a series of specific questions that reporters, academics, policymakers, and others can ask about claims made by developers of automated motor vehicles to facilitate a more critical, credible, and ultimately constructive understanding of the progress toward automated driving.
- Ethics of Artificial Intelligence in Transport, in The Oxford Handbook of Ethics of Artificial Intelligence (2020). This chapter uses the example of automated driving to highlight key ethical issues in the use of artificial intelligence in transport, including: the tension between technological solutions and policy solutions; the consequences of safety expectations; the complex choice between human authority and computer authority; and power dynamics among individuals, governments, and companies. It begins with the foundational relationship between ethics and transport more generally and concludes with a focus on the trustworthiness of the companies developing and deploying advanced technologies.
- New Technologies and Old Treaties, 114 American Journal of International Law Unbound 152–157 (2020), also available here. This essay presents the concrete case of automated driving as an opportunity to examine international law’s role in a world that artificial intelligence is helping to rapidly change. It introduces the road traffic conventions, identifies competing interpretations of their core driver requirements, and highlights ongoing efforts at the Global Forum for Road Traffic Safety to reach a consensus. Erratum: In this article I errantly call the Inland Transport Committee a "commission." I apologize for my mistake.
- It’s Not the Robot’s Fault! Russian and American Perspectives on Responsibility for Robot Harms (with Andrey Neznamov), 30 Duke Journal of Comparative and International Law 143-163 (2019), published in Russian in Zakon ("Law") (May 2019). In this article, two legal scholars—one from Russia and one from the United States—draw on the law of both countries to propose an integrated approach for civil liability for harms from automated vehicles, personal robots, and other cyberphysical systems.
- Issues Memos and Drafts for the ULC Uniform Automated Operation of Vehicles Act (2019), including the final act with comments and the drafting memoranda. These materials provide background on remote facilitation of the driving task (including but not limited to teleoperation), level 3 automation, following distance requirements, and the definition of a driver during automated operation, among other topics.
- Automated Driving and Product Liability, 2017 Michigan State Law Review 1 (2016). This article focuses on one cyberphysical domain — automated driving — to methodically analyze the so-called liability problem. It considers how automated driving could affect product liability, how product liability could affect automated driving, and how each could advance or impede the prevention of injury and the compensation of victims. It concludes that the current product liability regime, while imperfect, is probably compatible with the adoption of automated driving systems.
- Government Assessment of Innovation Shouldn't Differ for Tech Companies, New York Times, October 24, 2016. This short piece argues that, while legislators and regulators cannot have all the answers, they must get better at asking the key questions.
- How Can Government Officials Clear the Road for Self-Driving Cars?, Governing, April 8, 2016. This short piece summarizes key public policy recommendations.
- How Governments Can Promote Automated Driving, 2017 New Mexico Law Review 1 (2016). This article presents nearly 50 steps that governments at all levels can take now to encourage the socially beneficial development, deployment, and use of automated road vehicles. It begins with technical and policy overviews and concludes with a call to facilitate automated driving in part by expecting more from today’s drivers and vehicles.
- The Trolley and the Pinto: Cost-Benefit Analysis in Automated Driving and Other Cyber-Physical Systems, 4 Texas A&M Law Review 197 (2017). This article describes how interest in automated driving has brought new fame to a classic philosophical thought experiment (the “trolley problem”), critiques how this thought experiment has been applied in that context, proposes a more practical extension of that experiment based on risk rather than harm, notes that this extension may still involve programming value judgments, argues with reference to the Ford Pinto debacle that these judgments could inflame juries or the public at large, and emphasizes the need for appropriately focused public discussion of these issues.
- Controlling Humans and Machines, 30 Temple International and Comparative Law Journal 167 (2016). This article considers the “meaningful human control” of lethal weapons. Rather than focus on the role that a human should play in an otherwise automated weapon system, it reverses these human and machine roles to consider automated systems that limit human-initiated lethal force. After discussing the concept of control generally, it argues that a bias toward human authority could unduly preserve that authority and that the line between automated systems that initiate lethal force and automated systems that restrict that force is not clear.
- Select Legal Considerations for Shared Automated Driving (2016). This discussion paper introduces several legal considerations and policy recommendations for shared automated driving with a view toward grounding a broader policy discussion.
- Automated Driving Policy (book chapter), in Lecture Notes in Mobility: Road Vehicle Automation 3 (2016). This chapter summarizes a longer policy paper, How Governments Can Promote Automated Driving, which details steps that state and local governments can take now to encourage the responsible development, deployment, and use of automated road vehicles.
- Regulation and the Risk of Inaction (book chapter), in Autonomes Fahren (2015). This chapter first considers the nature of risk, the nature of regulation, and the challenge of regulating, in a broad sense, the increasing automation of motor vehicles. It then introduces four pairs of strategies to respond to this challenge: Ensure sufficient compensation for those who are injured, force information-sharing by the private sector to enhance regulation, simplify both the technical and the regulatory challenges in coordination, and raise the playing field for conventional actors along with automated systems.
- Lawyers and Engineers Should Speak the Same Robot Language (book chapter), in Robot Law (2015). This book chapter explains the importance of systems, language, use, and users—concepts familiar to both law and engineering—in the development and regulation of robots.
- Bryant Walker Smith on the Future of Self-Driving Cars, Popular Science, June 2015. "People ask me, ‘Are you concerned about self-driving cars?’ And I say, ‘Yes, but I’m terrified of today’s cars.’"
- Automated and Autonomous Driving: Regulation under Uncertainty, Organisation for Economic Co-operation and Development (OECD) (2015) (with Joakim Svensson) (principal contributing authors). This report explores strategic issues to be considered by policymakers in anticipation of automated vehicles.
- Proximity-Driven Liability, 102 Georgetown Law Journal 1777 (2014). This paper argues that commercial sellers’ growing information about, access to, and control over their products, product users, and product uses could significantly expand their point-of-sale and post-sale obligations toward people endangered by these products. It first describes how companies are embracing new technologies that expand their information, access, and control, with primary reference to the increasingly automated and connected motor vehicle. It next analyzes how this proximity to product, user, and use could impact product-related claims. It finally flips the analysis to consider how the uncertainty caused in part by changing liability could drive companies to further embrace this proximity.
- A Legal Perspective on Three Misconceptions in Vehicle Automation (book chapter), in Lecture Notes in Mobility: Road Vehicle Automation (2014). This chapter addresses three commonly misunderstood aspects of vehicle automation: capability, deployment, and connectivity. For each, it identifies a myth pervading public discussion, provides a contradictory view common among experts, explains why that expert view is itself incomplete, and discusses the legal implications of this nuance. These three aspects suggest a shift in transportation from a product model to a service model.
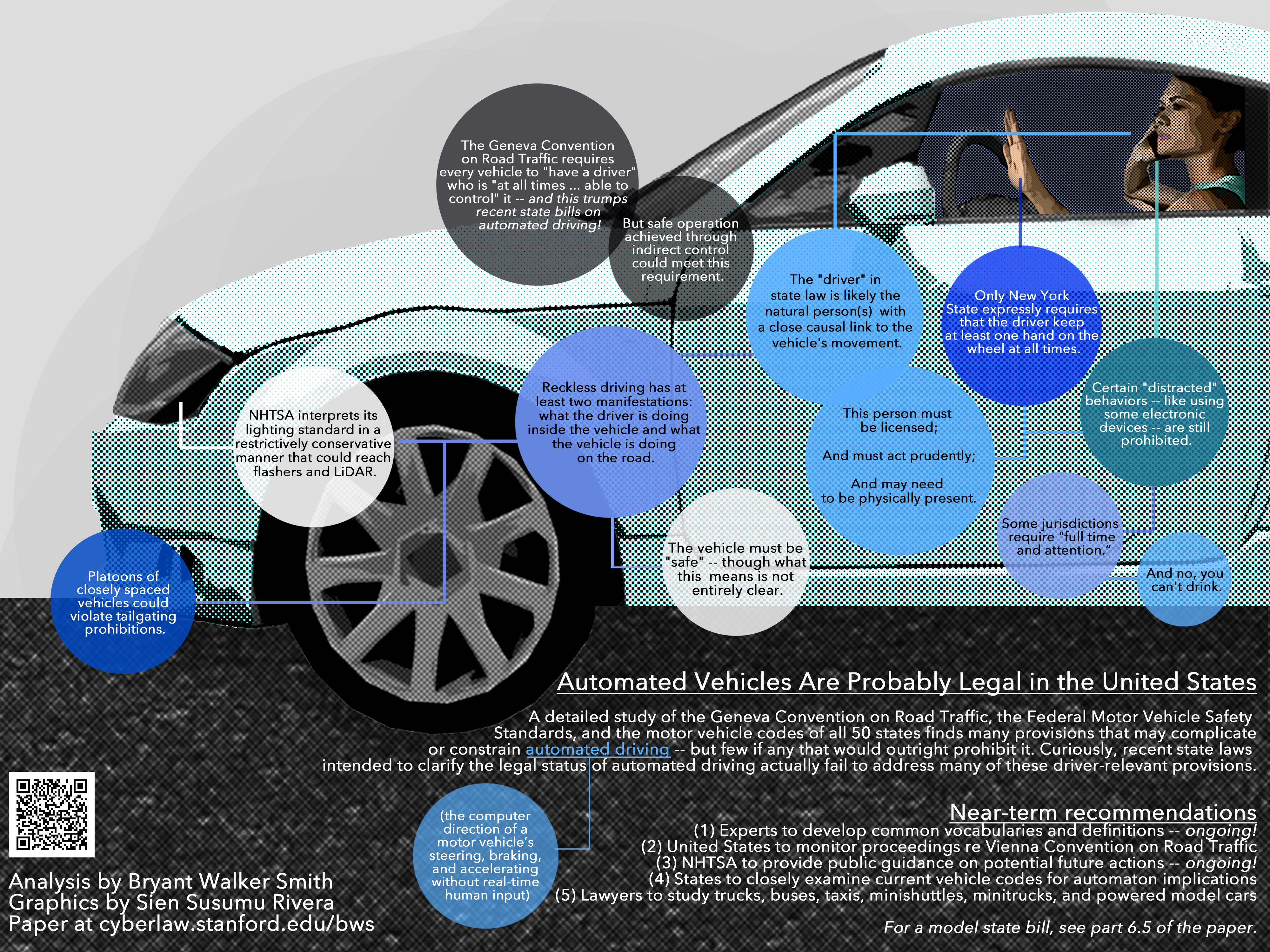
- Automated Vehicles Are Probably Legal in the United States, 1 Texas A&M Law Review 411 (2014) (originally published as white paper in 2012). This foundational article provides the most comprehensive discussion to date of whether automated vehicles can be lawfully sold and used on public roads in the United States. The short answer is that computer direction of a motor vehicle’s steering, braking, and accelerating without real-time human supervision is probably legal. The long answer, contained in the very long article, provides a foundation for tailoring regulations and understanding liability issues related to these vehicles.
- Rahmenbedingungen für die Fahrerassistenzentwicklung (book chapter), in Handbuch Fahrerassistenzsysteme 3. Auflage (2014) (with Tom Michael Gasser and Andre Seeck). This chapter describes legal principles and conditions for the development of advanced driver assistance systems.
- Automated Vehicle Technology: Ten Research Areas to Follow in 2014, TR News, issue 292 (May-June 2014) (with Bob Denaro, Johanna Zmud, Steven Shladover, and Jane Lappin). This article captures key insights from the major automated driving research conference that the five authors organized at Stanford University.
- Automated Vehicles: Language, Legality, and Liability, Thinking Highways, October 2012 (with Tom Michael Gasser). This article, written with a government lawyer in Germany, sketches an early vision for defining automated driving, assessing its legal status, and understanding its implications for civil liability.
- Who Is the Driver?, New Scientist, December 22, 2012, syndicated as How Do You Ticket a Driverless Car?, Slate, December 30, 2012. This short article, written before automated driving captured broad attention, previews key legal questions raised by increasing vehicle automation.
- Managing Autonomous Transportation Demand, 52 Santa Clara Law Review 1401 (2012), excerpted as Tomorrow’s World, Traffic Tech. Int’l, April-May 2013, at 4-10. This article argues that automation could significantly increase motor vehicle travel and that this increase could have important consequences for the physical and legal infrastructures in which tomorrow’s vehicles will operate. It discusses four key traffic engineering concepts, explains why automation could increase vehicle-miles traveled and shows how this increase could undermine some of the claims made about reducing congestion and emissions, identifies the potential effects of increased VMT on land use and argues that the law can help manage these effects by better internalizing the costs and benefits of motor vehicle travel, and offers preliminary recommendations.
- Water as a Public Good: The Status of Water under the General Agreement on Tariffs and Trade, 17 Cardozo Journal of International and Comparative Law 291 (2009). This article argues that water is not a “product” subject to the World Trade Organization’s General Agreement on Tariffs and Trade (GATT), because the established, widespread, and consistent assertion by states of public ownership over their water resources through both municipal and international law (the “public-ownership consensus”) precludes any reading of GATT that would fundamentally alter the unique status of those resources.
- Stakeholder Reaction to Emissions Trading in the United States, the European Union, and the Netherlands, 25 Journal of Land Use and Environmental Law 137 (2009). As a contribution to the debate over market-based environmental regulation, this article examines the reaction of stakeholders to cap-and-trade programs proposed or implemented in the United States, the European Union, and the Netherlands for industrial emissions of certain pollutants.
- Meaningful Participation in a Global Climate Regime, 39 Environmental Law Reporter: News and Analysis 10881 (2009). This article argues that an effective climate regime must be global rather than merely international and must recognize the significant involvement of actors other than states. It first examines the role of statism in the existing international climate regime and challenges assumptions that underlie the demand for the global South’s "meaningful participation" in that regime. It demonstrates how the global South is already participating in a global climate regime through the activities of private economic actors from around the world, and it proposes approaches for reconciling these two important regimes.
Key Resources
- Report of the US Department of Transportation's Transforming Transportation Advisory Committee (TTAC)
- How Academia Should Approach AI
- Taxonomy of Law and Technology
- Inclusive definition of Road traffic safety
- Driving Automation Definitions
- Uniform Law Commission's Uniform Law on the Automated Operation of Motor Vehicles
- Questions to Ask About AV Announcements
- Video Overview of Automated Driving
- The Trustworthy Company
- Carolina House Rules
- Hierarchy of AI Fears
Blog Posts
- Turquoise Lamps on Cars That Cannot Drive Themselves
- Comparing Robotaxis: Baidu's Apollo and Alphabet's Waymo
- Here's Where Federal Automated Driving Law Stands Near the End of the Biden Administration
- Over-the-air Updates and Regulatory Recalls
- On Cruise's Crash (and Quinn's Report)
- DALL-E Does Palsgraf
- An Academic Vision for AI Ethics
- On Remote Driving
- Deep in the Weeds of the Levels of Automation Lurks an Ambiguous Minimal Risk Condition
- California's AV Testing Rules Apply to Tesla's "FSD"
- Tracking NHTSA's "Driverless Vehicle" Rule
- Tesla's Fatal Crash
- A Sad Irony for Governor Ducy after Uber's Fatal Crash
- Uber's Fatal Crash
- The Senate's Automated Driving Bill Could Squash State Authority
- Congress's Automated Driving Bills Are Both More and Less Than They Seem
- Legislative Shout Outs to Georgia and Virginia
- Uber vs. the Law
- Michigan's Automated Driving Bills
- New Years Resolutions for Developers of Automated Vehicles
- Tesla and Liability
- Automated Vehicle Crashes
- Slow Down That Runaway Ethical Trolley
- New Book: Road Vehicle Automation
- Something Interesting in California's New Automated Vehicle Testing Rule
- Human Error as a Cause of Vehicle Crashes
- Uncertain Liability
- Looking at My Vehicle Automation Entries in the Rear-View Mirror
- Planning for the Obsolescence of Technologies Not Yet Invented
- The Reasonable Self-Driving Car
- The Impact of Automation on Environmental Impact Statements
- Driverless Carts Are Coming Sooner Than Driverless Cars
- Automated Vehicles Are Probably Legal in the United States
- A Self-Driving Crash Test
- Stanford Students: Fall 2012 Course on the Law of Autonomous Driving
- Planning for Autonomous Driving
- On Blind Drivers and Base Maps
- Driving at Perfection
- My Other Car Is a … Robot? Defining Vehicle Automation
- Backseat Driving
Posters
- Poster of the Model Automated Driving Laws (2017)
- How Governments Can Encourage Automated Driving (2015)
- Lawyers and Engineers Can Speak the Same Robot Language (2014)
- Law of the Newly Possible (2014)
- Automated Vehicles Are Probably Legal in the United States (2013)
- Legal Aspects of Automated Driving (2013)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Selected Slides
- The Trustworthy Company (2019)
- The Public Safety Case (2016)
- Developing Danger (2015)
- Regulating Automated Driving (2015)
- Automated Driving Macroliability (2016)
- Automated Driving Liability (2015)
- Ethical Issues in Automated Driving (2015)
- Intro to Blockchain (2017)
- Aerial Takings (2017)
- What Automated Driving Can Teach Us About Generative AI (2023)
Other Materials
- Materials for the US Department of Transportation's Transforming Transportation Advisory Committee
- How an (Autonomous Driving) Bill Becomes Law: An Oral History of Nevada's Groundbreaking Regulation of Self-Driving Vehicles, November 8, 2012
- Additional videos are available here (Multimedia tab) and here
Media Appearances
- Center for Internet and Society index (Select the "Press" tab at the bottom of my biography)
- Google index
Courses
See my courses