Publications
From NewlyPossible.org
Revision as of 21:26, 1 August 2017 by Neumoeglich (talk | contribs)
Selected works by Bryant Walker Smith on the Law of the Newly Possible, including Legal and Policy Aspects of Automated Driving and Aerial Automation
Twitter: @bwalkersmith
Model Laws
- Model State Automated Driving Law. This draft is intended to accommodate automated driving within existing state law (particularly with respect to registration, licensing, and operation).
- Model Federal Automated Driving Law. This draft is intended to accommodate automated driving within existing federal law (particularly with respect to certification and exemption).
- Poster of the Model Automated Driving Laws. This poster summarizes both the state and federal model laws as of July 2017.
Scholarly Articles
- Automated Driving and Product Liability, 2017 Mich. St. L. Rev. 1 (2016), http://ssrn.com/abstract=2923240. This article focuses on one cyberphysical domain — automated driving — to methodically analyze the so-called liability problem. It considers how automated driving could affect product liability, how product liability could affect automated driving, and how each could advance or impede the prevention of injury and the compensation of victims. The article concludes that the current product liability regime, while imperfect, is probably compatible with the adoption of automated driving systems. These systems, when introduced, are likely to be substantially safer than human-driven vehicles. Because driving decisions will shift from human drivers to automated systems (and their designers), a larger share of the crashes that nonetheless occur will implicate product liability law. This means that, in comparison to the automotive industry today, the automated driving industry will likely bear a bigger slice of a smaller pie of total crash costs. Under conservative assumptions, these costs are large—but not extraordinarily so.
- The Trolley and the Pinto: Cost-Benefit Analysis in Automated Driving and Other Cyber-Physical Systems, Tex. A&M L. Rev. (forthcoming 2017), http://ssrn.com/abstract=2983000. Automated driving has attracted substantial public and scholarly attention. This brief Article describes how that attention has brought new fame to a classic philosophical thought experiment (the “trolley problem”), critiques how this thought experiment has been applied in that context, proposes a more practical extension of that experiment based on risk rather than harm, notes that this extension may still involve programming value judgments, argues with reference to the Ford Pinto debacle that these judgments could inflame juries or the public at large, and emphasizes the need for appropriately focused public discussion of these issues. The article may be especially relevant to developers and regulators of cyber-physical systems, including the automated driving systems that operate self-driving vehicles.
- Controlling Humans and Machines, 30 Temple Int'l. & Comp. L.J. 167 (2016), http://ssrn.com/abstract=2908973. This article considers the "meaningful human control" of lethal weapons. However, unlike others on this topic, this article does not focus on the role that a human should play in an otherwise automated weapon system. Rather, it reverses these human and machine roles to consider automated systems that limit human-initiated lethal force. After discussing the concept of control generally, this piece argues, first, that a bias toward human authority could impede eventual restrictions on that authority and, second, that the line between automated systems that initiate lethal force and automated systems that restrict that force is potentially unclear.
- Select Legal Considerations for Shared Automated Driving (2016), https://www.itf-oecd.org/sites/default/files/docs/legal-considerations-shared-automated-driving.pdf. This discussion paper introduces several legal considerations for shared automated driving with a view toward grounding a broader policy discussion. It begins by discussing likely implementations of shared automated driving. It next considers the kinds of legal actions that developers and regulators of these automated driving systems might take to promote or police them. It then connects these potential actions to existing law by describing three ways of adapting that law to automated driving. Finally, it provides specific perspectives and recommendations on this and any legal change.
- How Governments Can Promote Automated Driving (2016), http://ssrn.com/abstract=2749375. This article presents nearly 50 steps that governments at all levels can take now to encourage the socially beneficial development, deployment, and use of automated road vehicles (so-called driverless, self-driving, or autonomous vehicles). After providing technical and legal context (including three pathways toward fully automated driving), it describes key administrative, legal, and community strategies. It concludes by urging policymakers to facilitate automated driving in part by expecting more from today’s drivers and vehicles.
- Automated Driving Policy (book chapter), in Lecture Notes in Mobility: Road Vehicle Automation 3 (2016), https://link.springer.com/chapter/10.1007/978-3-319-40503-2_5. This chapter summarizes a longer policy paper, How Governments Can Promote Automated Driving, which details steps that state and local governments can take now to encourage the development, deployment, and use of automated road vehicles. The chapter has four main parts. Context emphasizes the need to think broadly about relevant technologies, impacts, and laws. Administrative Strategies identifies steps that governments can take in the course of their ordinary operations. Legal Strategies recommends a careful legal audit and provides guidance on the legal changes or clarifications that may flow from such an audit. Community Strategies focuses on ways that communities can prepare for and even attract truly driverless systems that are responsive to local needs and opportunities.
- Regulation and the Risk of Inaction (book chapter), in Autonomes Fahren (2015), http://link.springer.com/chapter/10.1007/978-3-662-45854-9_27. This chapter first considers the nature of risk, the nature of regulation, and the challenge of regulating – in a broad sense – the increasing automation of motor vehicles. It then introduces four pairs of potential strategies to respond to this challenge: Ensure sufficient compensation for those who are injured (by expanding public insurance and facilitating private insurance), force information-sharing by the private sector to enhance regulation (by privileging the concrete and delegating the safety case), simplify both the technical and the regulatory challenges in coordination (by limiting the duration of risk and excluding the extreme), and raise the playing field for conventional actors along with automated systems (by rejecting the status quo and embracing enterprise liability).
- Lawyers and Engineers Should Speak the Same Robot Language (book chapter), in Robot Law (2015), http://www.elgaronline.com/view/9781783476725.00011.xml -- see also this draft or this poster. Engineering and law have much in common. Both require careful assessment of system boundaries to compare costs with benefits and to identify causal relationships. Both engage similar concepts and similar terms, although some of these are the monoglot equivalent of a false friend. Both are ultimately concerned with the actual use of the products that they create or regulate. And both recognize that the use depends in large part on the human user. This book chapter emphasizes the importance of these four concepts -- systems, language, use, and users -- to the development and regulation of robots. Although the chapter applies broadly to robotics, motor vehicle automation provides the primary example.
- Proximity-Driven Liability, 102 Georgetown L.J. 1777 (2014), http://ssrn.com/abstract=2336234. Commercial sellers’ growing information about, access to, and control over their products, product users, and product uses could significantly expand their point-of-sale and post-sale obligations toward people endangered by these products. The paper first describes how companies are embracing new technologies that expand their information, access, and control, with primary reference to the increasingly automated and connected motor vehicle. It next analyzes how this proximity to product, user, and use could impact product-related claims for breach of implied warranty, defect in design or information, post-sale failure to warn or update, and negligent enabling of a third-party’s tortious behavior. It finally flips the analysis to consider how the uncertainty caused in part by changing liability could actually drive companies to further embrace this proximity. This article is particularly relevant to the Internet of Things, including recent controversies about deactivation of purchased devices and the right to repair.
- A Legal Perspective on Three Misconceptions in Vehicle Automation (book chapter), in Lecture Notes in Mobility: Road Vehicle Automation (2014), http://ssrn.com/abstract=2459164. This chapter addresses three commonly misunderstood aspects of vehicle automation: capability, deployment, and connectivity. For each, it identifies a myth pervading public discussion, provides a contradictory view common among experts, explain why that expert view is itself incomplete, and finally discuss the legal implications of this nuance. Although there are many more aspects that merit clarification, these three are linked because they suggest a shift in transportation from a product model to a service model, a point with which the chapter concludes.
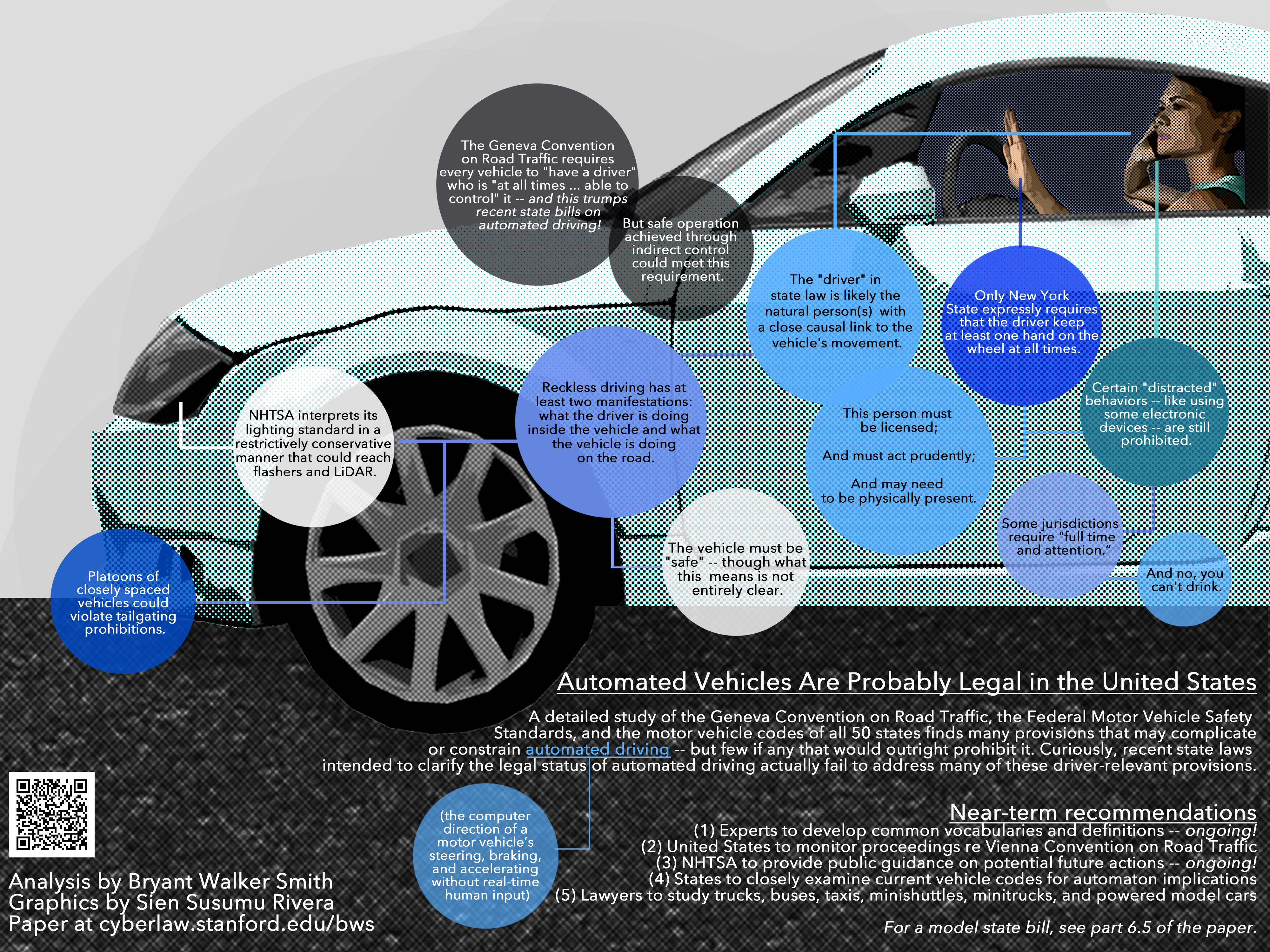
- Automated Vehicles Are Probably Legal in the United States, 1 Tex. A&M L. Rev. 411 (2014) (originally published as white paper in 2012), http://ssrn.com/abstract=2303904. This foundational article (originally published in 2012) provides the most comprehensive discussion to date of whether so-called automated, autonomous, self-driving, or driverless vehicles can be lawfully sold and used on public roads in the United States. The short answer is that the computer direction of a motor vehicle’s steering, braking, and accelerating without real-time human input is probably legal. The long answer, contained in the article, provides a foundation for tailoring regulations and understanding liability issues related to these vehicles.
- Managing Autonomous Transportation Demand, 52 Santa Clara L. Rev. 1401 (2012), excerpted as Tomorrow’s World, Traffic Tech. Int’l, April-May 2013, at 4-10, http://ssrn.com/abstract=2303907. This article argues that automation could significantly increase motor vehicle travel and that this increase could have important consequences for the physical and legal infrastructures in which tomorrow’s vehicles will operate. The article (1) discusses four key traffic engineering concepts: vehicle miles traveled (VMT), capacity, demand, and the time-cost of travel; (2) explains why automation could increase VMT and then shows how this increase could undermine some of the claims made with respect to congestion and emissions; (3) identifies the potential effects of increased VMT on rural and urban land use and argues that the law can help manage these effects by better internalizing the costs and benefits of motor vehicle travel, and (4) offers preliminary recommendations.
Joint Articles
- Bryant Walker Smith and Joakim Svensson (principal contributing authors), Automated and Autonomous Driving: Regulation under Uncertainty, Organisation for Economic Co-operation and Development (OECD), May 2015, http://www.internationaltransportforum.org/pub/pdf/15CPB_AutonomousDriving.pdf
- Tom Michael Gasser, Andre Seeck, and Bryant Walker Smith, Rahmenbedingungen für die Fahrerassistenzentwicklung (book chapter), in Handbuch Fahrerassistenzsysteme 3. Auflage (2014), https://books.google.com/books?id=6cj0BgAAQBAJ
- Steven Shladover, Jane Lappin, Bob Denaro, and Bryant Walker Smith, Introduction: The Transportation Research Board’s 2013 Workshop on Road Vehicle Automation (book chapter), in Lecture Notes in Mobility: Road Vehicle Automation (2014), http://link.springer.com/chapter/10.1007/978-3-319-05990-7_1
- Bob Denaro, Johanna Zmud, Steven Shladover, Bryant Walker Smith, and Jane Lappin, Automated Vehicle Technology: Ten Research Areas to Follow in 2014, TR News, issue 292 (May-June 2014), http://onlinepubs.trb.org/onlinepubs/trnews/trnews292.pdf
- Bryant Walker Smith and Tom Michael Gasser, Automated Vehicles: Language, Legality, and Liability, Thinking Highways, October 2012
Other Articles
- Government Assessment of Innovation Shouldn't Differ for Tech Companies, NY Times, October 24, 2016, http://www.nytimes.com/roomfordebate/2016/10/24/silicon-valley-goes-to-washington/government-assessment-of-innovation-shouldnt-differ-for-tech-companies
- How Can Government Officials Clear the Road for Self-Driving Cars?, Governing, April 8, 2016, http://www.govtech.com/fs/How-Can-Government-Officials-Clear-the-Road-for-Self-Driving-Cars.html
- Bryant Walker Smith on the Future of Self-Driving Cars, Popular Science, June 2015, http://www.popsci.com/whos-responsible-when-self-driving-car-crashes
- Who Is the Driver?, New Scientist, December 22, 2012, syndicated as How Do You Ticket a Driverless Car?, Slate, December 30, 2012, http://www.slate.com/articles/health_and_science/new_scientist/2012/12/laws_for_driverless_cars_who_is_responsible_for_crashes_and_traffic_violations.html
Key Reference Documents
- Model Federal Automated Driving Law
- Model State Automated Driving Law
- Automated Driving: Legislative and Regulatory Action, http://cyberlaw.stanford.edu/wiki/index.php/Automated_Driving:_Legislative_and_Regulatory_Action
- SAE Levels of Driving Automation, http://cyberlaw.stanford.edu/loda
Selected Blog Posts
- Legislative Shout Outs to Georgia and Virginia, https://cyberlaw.stanford.edu/blog/2017/02/legislative-shout-outs-georgia-and-virginia
- Uber vs. the Law, https://cyberlaw.stanford.edu/blog/2016/12/uber-vs-law
- Michigan's Automated Driving Bills, https://cyberlaw.stanford.edu/blog/2016/09/michigans-automated-driving-bills
- New Years Resolutions for Developers of Automated Vehicles, https://cyberlaw.stanford.edu/blog/2016/01/new-years-resolutions-developers-automated-vehicles
- Tesla and Liability, https://cyberlaw.stanford.edu/blog/2015/05/tesla-and-liability
- Automated Vehicle Crashes, https://cyberlaw.stanford.edu/blog/2015/05/automated-vehicle-crashes
- Slow Down That Runaway Ethical Trolley, https://cyberlaw.stanford.edu/blog/2015/01/slow-down-runaway-ethical-trolley
- New Book: Road Vehicle Automation, https://cyberlaw.stanford.edu/blog/2014/06/new-book-road-vehicle-automation
- Something Interesting in California's New Automated Vehicle Testing Rule, https://cyberlaw.stanford.edu/blog/2014/05/something-interesting-californias-new-automated-vehicle-testing-rule
- Human Error as a Cause of Vehicle Crashes, https://cyberlaw.stanford.edu/blog/2013/12/human-error-cause-vehicle-crashes
- Uncertain Liability, https://cyberlaw.stanford.edu/blog/2013/05/uncertain-liability
- Looking at My Vehicle Automation Entries in the Rear-View Mirror, https://cyberlaw.stanford.edu/blog/2013/10/looking-my-vehicle-automation-entries-rear-view-mirror
- Planning for the Obsolescence of Technologies Not Yet Invented, https://cyberlaw.stanford.edu/blog/2013/10/planning-obsolescence-technologies-not-yet-invented
- The Reasonable Self-Driving Car, https://cyberlaw.stanford.edu/blog/2013/10/reasonable-self-driving-car
- The Impact of Automation on Environmental Impact Statements, https://cyberlaw.stanford.edu/blog/2013/10/impact-automation-environmental-impact-statements
- Driverless Carts Are Coming Sooner Than Driverless Cars, https://cyberlaw.stanford.edu/blog/2013/09/driverless-carts-are-coming-sooner-driverless-cars
- Automated Vehicles Are Probably Legal in the United States, https://cyberlaw.stanford.edu/blog/2013/04/automated-vehicles-are-probably-legal-united-states
- A Self-Driving Crash Test, https://cyberlaw.stanford.edu/blog/2012/07/self-driving-crash-test
- Stanford Students: Fall 2012 Course on the Law of Autonomous Driving, https://cyberlaw.stanford.edu/blog/2012/07/stanford-students-fall-2012-course-law-autonomous-driving
- Planning for Autonomous Driving, https://cyberlaw.stanford.edu/blog/2012/05/planning-autonomous-driving
- On Blind Drivers and Base Maps, https://cyberlaw.stanford.edu/blog/2012/03/blind-drivers-and-base-maps
- Driving at Perfection, https://cyberlaw.stanford.edu/blog/2012/03/driving-perfection
- My Other Car Is a … Robot? Defining Vehicle Automation, https://cyberlaw.stanford.edu/blog/2012/02/my-other-car-robot-defining-vehicle-automation
- Backseat Driving, https://cyberlaw.stanford.edu/blog/2012/02/backseat-driving
Posters
- Poster of the Model Automated Driving Laws (2017)
- How Governments Can Encourage Automated Driving (2015)
- Lawyers and Engineers Can Speak the Same Robot Language (2014)
- Law of the Newly Possible (2014)
- Automated Vehicles Are Probably Legal in the United States (2013)
- Legal Aspects of Automated Driving (2013)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Selected Slides
- The Public Safety Case (2016)
- Developing Danger (2015)
- Regulating Automated Driving (2015)
- Automated Driving Macroliability (2016)
- Automated Driving Liability (2015)
- Ethical Issues in Automated Driving (2015)
Course Materials
Other Materials
- How an (Autonomous Driving) Bill Becomes Law: An Oral History of Nevada's Groundbreaking Regulation of Self-Driving Vehicles, November 8, 2012, http://cyberlaw.stanford.edu/events/how-autonomous-driving-bill-becomes-law
- Additional video is available under the multimedia tab here